在2024年12月的理想AI Talk对话节目中,理想汽车CEO李想被问及“特斯拉没有用激光雷达,你们为什么要用”时,他坦言保留激光雷达是为了安全。
李想表示,中国路况与美国不同,深夜驾驶时可能会遇到尾灯损坏的大货车,甚至大货车会停在主路上。在这种情况下,激光雷达可以看到200米远的距离,而摄像头在无光环境下的可视距离只有100多米。这使得激光雷达能够实现130公里/小时的AEB自动紧急制动功能。
AEB的关键性能指标包括刹停速度与误报率,激光雷达能实现更远距离的探测,对物体的检测也更加灵敏,在高速场景里保证了更高的刹停速度,在城区里则有效降低误报率。因此,不少业内人士认为,激光雷达除了承担安全冗余的角色,更是实现AEB功能必不可少的感应器,是“功能件”。
事实上,特斯拉与国内车企的路线分歧本质是“算法驱动”与“硬件驱动”的理念之争。特斯拉压押注于通过海量数据训练出“全能算法”,最终实现“无雷达”的纯视觉自动驾驶;而国内车企则选择用硬件堆砌安全冗余,通过多传感器互补应对复杂场景。
单一技术的安全威胁在于安全冗余能力的不足,视觉可能“看不见”,激光雷达可能“看不懂”。在真实场景中,一场大雾足以让视觉系统失效,一个反光物体可能让激光雷达误判,任何单一传感器的“脆弱性”都可能成为系统性风险的导火索。
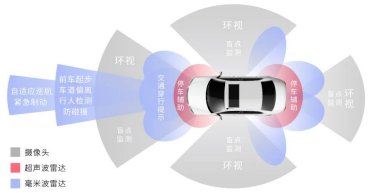
通过将激光雷达、摄像头、毫米波雷达等多种传感器的感知数据进行融合处理,能够提供更为准确、完整的环境信息。这种融合感知技术能够充分利用各种传感器的优势,通过在时间和空间上对不同传感器的信息进行对齐和优化,从而弥补单一传感器的缺陷。
比如在融合激光雷达和摄像头时,激光雷达提供准确的空间位置和深度信息,而摄像头则补充色彩、纹理等语义信息,二者结合能够实现更全面的目标检测和识别。
不过,融合感知技术的推广仍面临成本、技术和法规等多方面的挑战。首先,融合感知技术需要集成多种传感器,这增加了系统的复杂性和成本。其次,不同传感器之间的数据融合需要高精度的校准和同步,这对技术实现提出了很高的要求。
单车智能之外的另一条路径
虽然特斯拉不断为纯视觉路线摇旗呐喊,但目前纯视觉路线仍未是智驾的终局,美国针对纯视觉路线的反思与讨论从未停歇。出于安全的考虑,激光雷达也还远未到被淘汰之时,其作为车企的重要营销卖点,短期内都不会出现变化。
从国内的技术能力出发,现阶段要实现去激光雷达还有难度。特斯拉之所以捍卫纯视觉路线,是基于其在数据、算力与算法三方面的巨量投入。
在考虑成本的时候,不能够只看到硬件成本,实际上更要考虑背后所需要各种研发服务和资源投入,也就是“全成本”——除了冰山上面的显性成本,还有大量被忽视的隐性成本,包括算法、路测、云计算、数据标注、仿真训练和系统软件等。
换句话说,特斯拉作业并不好抄,其用数据和算力构建起的门槛和壁垒都极高。
早期,智能辅助驾驶供应链刚刚起步,激光雷达尚未能达到相当稳定的性能表现,且造价高昂,以万元为单位,车企们望而却步,激光雷达只能搭载在Robotaxi以及高端车型。
但随着产业发展,激光雷达已经有了更高的可靠性与成本表现,售价降至千元级别,这也是高阶智能辅助驾驶能够逐步下沉的根本原因。
今年,高阶智能辅助驾驶来到了20万元以内的汽车市场,在这个价格带里,选择激光雷达上车的车企越来越多。
实际上,只要成本降到一定程度,车企就无法拒绝激光雷达的上车,因为激光雷达与先进的算法架构并不冲突,反而能提升智能辅助驾驶系统的鲁棒性。
除了单车智能,通过AI网络紧密连接路侧传感器、车载终端、云端算力中心等各个节点要素,实现对环境数据信息的实时感知、智能决策与精准控制,可根据不同交通场景动态调配计算资源,支持超视距感知、多车协同控制、交通流优化等复杂任务。
通过与大模型相互配合,AI网络构建起实时物理世界数字镜像,通过多样化的传感器融合、边云协同计算与城市级V2X部署,系统可感知整条路径上的交通动态,并实时推送给前后车辆,实现集体智慧下的自主决策,从而将“单车智能”进化为“系统智能”。
当前,智能辅助驾驶正从早期试点迈向规模化普及阶段,这一过程需要技术创新与用户体验的平衡共进。激进的技术冒进可能对行业普及进程造成冲击,而以用户为中心的安全体验远胜于技术“炫技”。
智能辅助驾驶的行业终局尚未明晰,但行业共识已然清晰:无论技术路径如何选择,安全始终是不可逾越的底线。在关乎生命安全的领域,稳步构建可靠的技术体系,让用户在每一次出行中感受到有温度、可信赖的技术守护,才是智能辅助驾驶技术普惠大众的正确打开方式。
*以上内容来源于极智GeeTech