
经过十余年的发展,乘用车自动驾驶终于开始摆脱了L2辅助驾驶的长路漫漫,跑步进入L3有条件自动驾驶的新阶段。正如郭德纲并非成名于哪一晚,而是成名于花团锦簇之前的每一个夜晚一样,自动驾驶等级的跃迁也不是一蹴而就的。在这个漫长的十余年里,传感器、执行器、自动驾驶芯片、算法范式、模型架构、工具链等方方面面都在日拱一卒,积跬步以至千里,最终才聚沙成塔,带动着高等级自动驾驶走入了试点商用阶段。传感器方面,摄像头由200万像素一路升级到800万甚至1200万像素,超声波雷达开始支持爆胎监测,毫米波雷达由3D升级到4D,激光雷达也在经历着低帧率、低线数到更高帧率、更高线数的一路演进。执行器方面,转向、制动、驱动逐渐电控化、线控化,不断提升响应速度和控制精度。自动驾驶芯片方面,算力、带宽不断提升,由原生支持CNN转向搭载原生Transformer引擎。算法范式由规则驱动的代码转向数据驱动的AI模型,再转向结合数据驱动和专家知识驱动的生成式AI大模型,模型架构由CNN转向Transformer,由小模型转向大模型,由判别式AI转向生成式AI。总之,整个自动驾驶产业链上上下下、前前后后、左左右右不断发生并积累的变化,促成了整个行业开始迈入L3阶段的新局面。鉴于各路媒体已经长篇累牍地论述了自动驾驶行业在芯片和算法领域的一路变迁,今天笔者将讨论的重点放在传感器和执行器的层面,探讨一下在L3有条件自动驾驶等级的要求下,这些零部件将出现怎样的变化?
传感器-多颗激光雷达
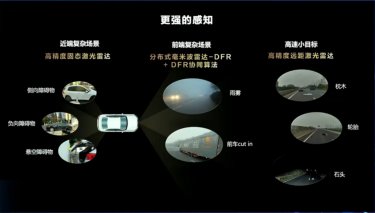
从L2++城区NOA到L2+++全场景NOA,从L2+++车位到车位NOA再到L3,自动驾驶系统等级升级的背后是设计运行域ODD的一路拓展,自动驾驶等级的提升意味着原本需要多个条件定义的ODD边界条件逐渐缩减、逐渐放宽,将原本需要满足天时(天气良好、光照充足)、地利(车道线清晰、无施工、道路拓扑简单)、人和(交通流简单)之下才能发挥系统能力的场面,转化为不惧恶劣天气,可以夜以继日,能够上天入地、穿行大街小巷。这种更复杂、更全面的场景要求给自动驾驶系统的感知能力提出了更高的挑战。
L3自动驾驶来袭,感知和执行如何升级?
▲ 图片来源:华为说到感知传感器,话题自然离不开已经被争论多年的多传感器融合和纯视觉技术路线之争。吵来吵去,不过是因为很多只看热闹、不关心门道的人没有抓住问题的玄妙。问题的本质核心在于,自封第一原理行走的代言人的马斯克和特斯拉认为,在具备更高动态范围HDR、更强图像传感器芯片、更强大AI神经网络的帮助下,摄像头也能具备激光雷达本身就天然具备的3D感知能力和无惧黑夜、 强光、眩光、逆光、暗光的能力。如果事情发展的终局是,摄像头在CIS、ISP、AI这些外挂的帮助下能够复制激光雷达的能力,为何还要激光雷达这个阑尾呢?

▲ 图片来源:网络没有人能预测事情发展的终局,特斯拉FSD的主动安全能力不及华为ADS的事实,也在一定程度上证伪了马斯克的构想。事实上,早在2014年开始,马斯克每年都会至少声称一次特斯拉第二年就能实现完全自动驾驶。这么多年过去了,特斯拉FSD至今依然离不开方向盘和制动踏板,川普上台前大美丽监管部门对特斯拉历年来几百起事故的调查又把坚持纯视觉路线的FSD的安全性推上了风口浪尖。马斯克频频被打脸,一年又一年,以至于大家纷纷展开思想实验,如果特斯拉在现阶段开始使用激光雷达,是不是就能够率先实现L3?把玩笑话放在一边,虽然在CIS+AI加持下视觉能力的进步叠加无惧光照、雨雾的4D毫米波雷达似乎有希望取代激光雷达,但是,站在终局的视角上,尚无法确定激光雷达是不是L3有条件自动驾驶的必备硬件。不过,虽然争议还在继续,主流车企依然把激光雷达当成了高等级自动驾驶的必备件。在蔚来、华为、极氪相继发布的L3自动驾驶原生架构中,激光雷达发挥着比较核心的使用。蔚来汽车刚刚开始交付的行政旗舰ET9使用了三颗激光雷达,极氪9X光辉版使用了五颗激光雷达,将激光雷达的数量推到了最高峰。华为方面,在ADS 3.X阶段,问界和智界车型上普遍使用一颗激光雷达,华为与宁德时代和长安汽车共同打造的高端电动车品牌阿维塔使用了三颗激光雷达,除了一颗位于车顶的远距离激光雷达之外,还有两颗补盲激光雷达。到了2025款问界M9、享界S9、问界M8、尊界S800上面,华为ADS 4.0 L3级有条件自动驾驶系统的激光雷达使用量从之前的1-3颗来到了4颗,在车顶激光雷达、两颗补盲激光雷达之外,在车辆后方增加了一颗检测负向障碍物的激光雷达。

▲ 图片来源:华为
在辅助驾驶走向有条件自动驾驶的关键时间节点上,本土车企似乎在重新喊出长城汽车当年打出的那句宣传语:四颗激光雷达以下别说话!
执行器-跨域融合、线控化
尽管大家在纯视觉和多传感器融合的感知技术路线上还在争来争去,但在执行器这个层面,业界已经达成了共识,线控底盘是实现L3等级自动驾驶的必要条件!线控技术响应快的优良特性可以满足高等级智能驾驶的实时性要求,线控方案执行精度高的优点可以满足高等级智能驾驶的可靠性要求。

▲ 图片来源:比亚迪说到底盘,得益于过去两三年中车企和媒体层面的大力传播,大家首先想到的概念是带有路面预瞄功能的智能底盘,即通过识别前方路面的坑洼情况,提前调节阻尼和刚度,以改善车辆通过时的颠簸表现。但是,尽管预瞄功能能够大幅度改善车辆在垂向(Z向)的表现和用户体验,但它跟L3有条件自动驾驶其实并没有太大的关系,因为,自动驾驶系统的分级标准主要落脚到对车辆纵向(X向)和横向(Y向)的控制上,对关乎用户舒适性体感和颠簸表现的垂向控制并没有做出太多的要求。

▲ 图片来源:比亚迪
自动驾驶系统等级的一路跃迁就是系统的持续性不断升级的历史,与同样要求系统同时控制车辆纵向、横向运动的L2级辅助驾驶相比,L3有条件自动驾驶的要求体现在能够在尽可能宽松的ODD内持续执行动态驾驶任务DDT。ODD即自动驾驶系统的设计运行域,以一种不太严谨的角度来看,大致可以类比着分为天时、地利、人和三个层面,天时即天气和光照条件,地利即道路基础设施和路面条件,人和即交通场景。为了保证系统能够在3D时空下持续执行DDT,传感器的升级着力解决天时层面的天气和光照问题,轻量级高精地图或地图实时在线重建算法着力解决地利层面的道路基础设施问题,端到端方案着力解决人和层面的交通场景复杂性问题,而线控底盘解决的是自动驾驶车辆在地利层面各种路面条件下的安全舒适高效行车问题。在保障连续行车过程的安全、舒适、高效上,一方面,线控底盘可以通过线控化带来的更短通信和执行链路、电动化带来的快速响应特性实现自动驾驶系统执行层的强实时、高精度,另一方面,底盘域与自动驾驶域的深度融合可以通过全地形识别和道路预瞄,提升车辆面对复杂路面环境的适应性和舒适性,并通过驱动、制动、转向、悬架多个执行器的高效协同控制为自动驾驶提供实时稳定的运行边界。
▲ 图片来源:比亚迪
底盘域内横纵垂控制的融合、底盘域与智驾域的融合、底盘域和其他系统结构的融合,可实现极限工况下底盘的智能运动控制,保障全地形条件下的行车安全。类比头脑发达、四肢健全的人类,自动驾驶域与底盘域的深度融合意味着大小脑的分工协作,相当于人类大脑的自动驾驶系统负责感知、定位、规划、决策这些高级功能,相当于人类小脑的底盘负责控制车辆在横纵垂向上的控制和协调,并建立类似于人类基于本能安全的反射调节机制,基于车辆实时稳定域监控等模块对车辆行车安全进行并行的监控与保护。华为针对雨雪、湿滑路面提前舒适制动实现的路面自适应AEB,比亚迪针对各种路面条件探索最优滑移率区间,并基于融合感知、滑移率识别实现的自适应路面感知控制技术,都属于这方面的有益探索。
写在最后
小米SU 7的一场事故让大众对辅助驾驶系统的信任降到了冰点,工信部也适时地收紧了监管。越是在这样的时刻,本土车企们越是要一方面把牢安全的底线,另一方面积极地推高系统的能力上限,尽快迈入到L3的阶段,以真实的成绩重塑消费者对辅助驾驶系统的信赖与安心感。在这个过程中,更高线数、能够覆盖更大感知范围的激光雷达,以及可提高自动驾驶系统控制的实时性、准确性的线控化智能底盘都能做出自己的贡献!
*以上内容来源于AI电堂